Le regole sono semplici, 10cm x 10cm x 500g. Il resto è tutto astuzia e strategia.
Per progettare il nostro robot da minisumo iniziamo con il disegno delle parti, per capire gli ingombri e come risolvere alcuni problemi costruttivi.
Datemi un punto d’appoggio…
 Iniziamo disegnando un quadrato di 9 cm x 9 cm (ci terremo 5 mm per lato di margine rispetto alle dimensioni massime previste) ed estrudiamo per un’altezza di 2 mm.
Iniziamo disegnando un quadrato di 9 cm x 9 cm (ci terremo 5 mm per lato di margine rispetto alle dimensioni massime previste) ed estrudiamo per un’altezza di 2 mm.
In questo modo abbiamo creato la base del nostro robot in cui andranno ricavate le sedi per i motori, le ruote ed i sensori di linea.
A tutto vapore…
Disegniamo i motori, non occorre che siano particolareggiati, basta anche un semplice parallelepipedo che rappresenti l’ingombro del pezzo meccanico.

Posizioniamoli a 12mm dai bordi esterni ed allineati con il retro del nostro quadrato e creiamo lo spazio che ci serve per le ruote.
Creiamo per l’appunto una rientranza da metà del lato fino al bordo del motore.
Non è necessario essere precisi, ci basterà avere lo spazio per far sporegere le ruote.
Il cerchio, la forma perfetta…
Disegnamo le ruote e posizioniamole accanto ai motori, allineandole con gli assi.
Avranno un raggio di 20 mm per una profondità di 10mm.
 Verifichiamo bene l’allineamento delle ruote tra loro mettendoci nella vista laterale.
Verifichiamo bene l’allineamento delle ruote tra loro mettendoci nella vista laterale.
Energia…
Altro elemento particolarmente ingombrante sarà il portabatterie.
Ne ho selezionato uno adatto a 5 elementi di tipo AA (D:16.7 mm, H:78.5 mm, W:58.3 mm) in modo da ottenere 7.5V con le pile alcaline da 1.5V.
Disegnamo quindi un parallelepipedo che rappresenti l’ingombro del portapile e cerchiamo di posizionarlo nel nostro robot.
Solitamente si trovano due possibili soluzioni, dato che le batterie devono rimanere accessibili per essere sostituite con facilità quando scariche.
Nel primo caso vengono posizionate sotto la base del robot, sono facili da raggiungere ma allontanano gli assi dei motori da terra e ci costringono a prevedere delle ruote con un diametro maggiore.

Dato che le ruote rappresentano una leva, maggiore è il raggio, minore sarà la coppia esprimibile dai motori sul suolo.
Nel secondo caso il porta batterie viene posizionato davanti in verticale come una sorta di scudo, in questo caso i motori potranno essere posti più in basso e le ruote potranno avere un minor raggio con evidenti vantaggi per la coppia espressa al suolo.
Come fissare i motori alla base?

Possiamo adottare un supporto commerciale che affrancheremo alla base con due bulloncini.
Se invece disponiamo di una stampante 3D possiamo prevedere di estrudere due supporti adeguatamente rinforzati in cui ricaveremo i fori per il fissaggio dei motori.

Come si può vedere dal particolare il rinforzo serve a dare maggiore rigidità all’insieme e contemporaneamente crea uno spazio dove potremo inserire la zavorra per portare il peso complessivo del nostro robot ai 500g che il regolamento prevede.
Dal disegno alla pratica…
Finite le considerazioni teoriche, possiamo passare alla parte pratica.
Abbiamo due possibilità:
- lavorare una lastra di materiale plastico come il forex;
- stampare in 3D il nostro modello;
Personalmente ho adottato la seconda strada, come potete vedere dalle immagini.
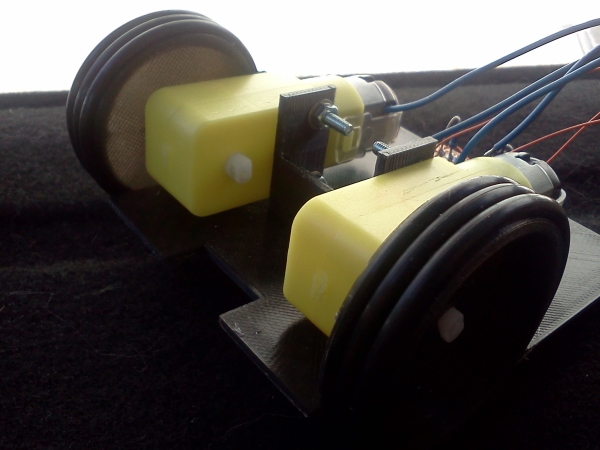
Le ruote, anch’esse stampate montano tre o-ring da 40mm ciascuna, per aumentare il grip sul tatami.
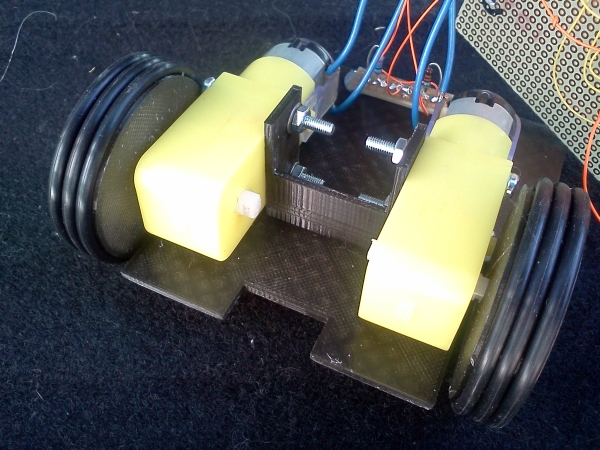
Sopra ai motori resta tutto lo spazio per alloggiare l’elettronica che vedremo nelle prossime puntate.
- Regole del minisumo (PDF)