Un team giapponese sta collaudando sensori flessibili per garantire un futuro “soffice” ai robot di domani.
Nella cultura popolare, nel pensare ai robot ci giungono alla mente immagini di pesanti esoscheletri metallici a la Terminator, eppure studiosi di tutto il mondo si stanno muovendo in direzione diametralmente opposta, esplorando l’alta adattabilità dei tessuti molli.
Questi strumenti prendono forma grazie a fasce di gomma che generano movimento attraverso la pressurizzazione, emulando di fatto il funzionamento dei comuni tessuti muscolari.

Si tratta tuttavia di un processo complesso, che genere una serie di peculiari difficoltà. A differenza dei loro “colleghi” rigidi, i robot elastici devono infatti tenere conto di una serie aggiuntiva di fattori che spaziano dal movimento al logorio dei materiali.
Per compensare queste insidie, le loro strutture si arricchiscono abitualmente di minuziosi sensori laser che, tuttavia, hanno il difetto di essere rigidi, vanificando parzialmente l’innovazione di una simile tecnica.
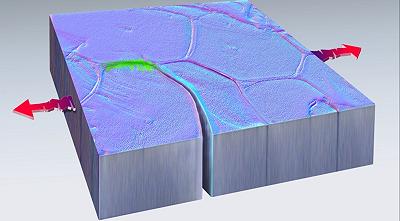
La trovata dei ricercatori guidati dal professore associato Kohei Nakajima è stata quella di rivestire le pareti dei muscoli artificiali pneumatici (PAM) con una rete di carbonio. Il carbonio, forte di un’alta elasticità, accompagna la tensione della gomma, registrandone il movimento.
Abbiamo notato che la resistenza elettrica del materiale adoperato per i PAM varia a seconda delle forme che assume durante la contrazione. Passiamo quindi i dati al network, così che possa comunicare lo stato del PAM. La normale gomma è isolante, quindi abbiamo incorporato del carbonio dentro i materiali, in modo da leggere con più facilità la variazione di resistenza. Nei test di laboratorio abbiamo scoperto che il sistema è in grado di emulare l’alta precisione dei sensori laser attualmente in commercio
ha dichiarato Nakajima.

L’ottimizzazione della robotica soffice consentirebbe la creazione di apparecchi fenomenali per sostenere la riabilitazione umana, nonché offrirebbe spunti preziosi per l’ingegneria biomedica.
Potrebbe interessarti:
- IEEE International Conference on Soft Robotics (robosoft2020.org)
- A soft touch for robotic hardware (eurekalert.org)