NASA: le nuove strutture robotiche auto-assemblanti sono la nuova fase della costruzione spaziale
Meccanici, ultraleggeri, resistenti e autoriprogrammabili: così sono stati descritti gli ARMADAS, ovvero il futuro della costruzione spaziale auto assemblante
La NASA sta pensando al futuro e lo fa sempre più nell’ottica dell’esplorazione (e possibile permanenza) nello spazio. A questo proposito, ha appena presentato una struttura robotica auto-assemblante che potrebbe essere una parte cruciale del trasferimento fuori dal nostro pianeta.
La NASA presenta gli ARMADAS
Pubblicato su Science Robotics, il documento del NASA Ames Research Center descrive la creazione e il collaudo di ciò che viene chiamato “metamateriali meccanici autoriprogrammabili“, un modo molto preciso per descrivere un edificio che si costruisce da solo. L’inevitabile acronimo è “Automated Reconfigurable Mission Adaptive Digital Assembly Systems”, o ARMADAS. “Pensiamo che questo tipo di tecnologia di costruzione possa servire per molte applicazioni generali“, ha dichiarato l’autrice principale Christine Gregg a TechCrunch. “Nel breve termine, la robusta autonomia e la leggerezza delle strutture del nostro approccio favoriranno fortemente le applicazioni in ambienti difficili, come la superficie lunare o lo spazio. Ciò include la costruzione di torri di comunicazione e rifugi sulla superficie lunare, che saranno necessari prima dell’arrivo degli astronauti, nonché di strutture in orbita come bracci e antenne“.
Voxel e robot: la ricetta degli edifici spaziali auto assemblanti

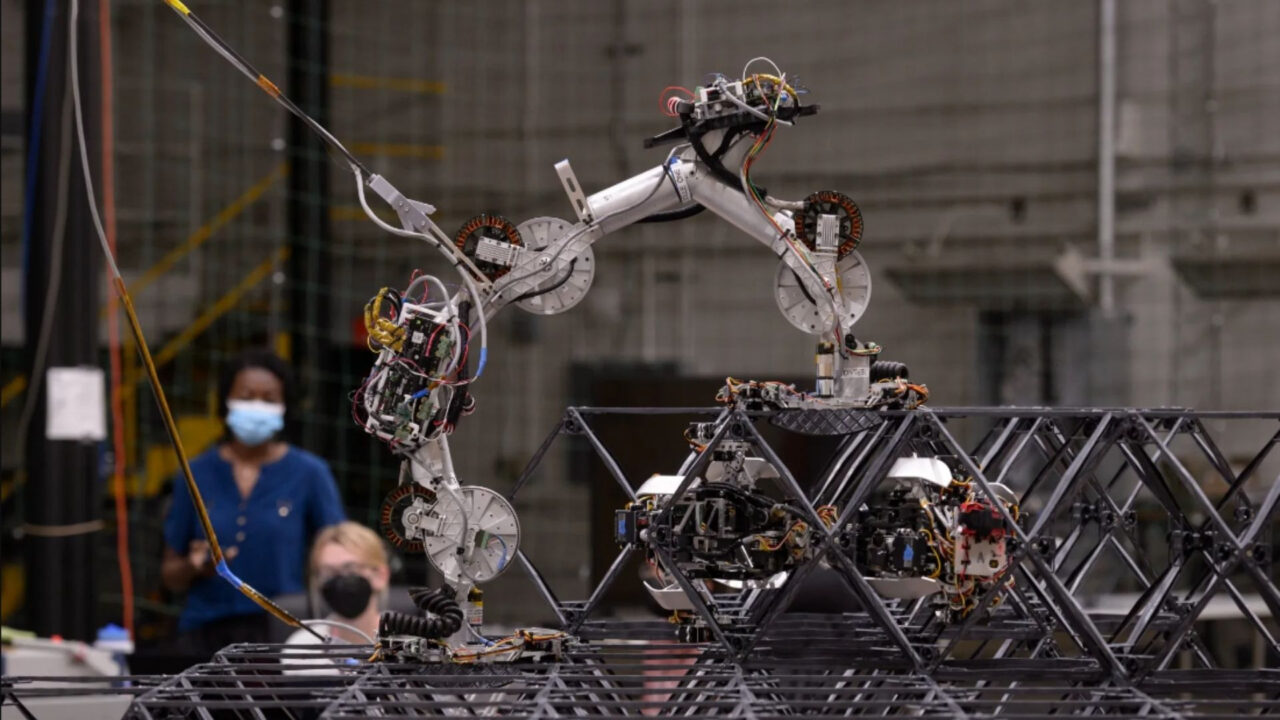
L’idea di base della struttura autocostruita sta in un’abile sinergia tra il materiale da costruzione (cornici cubottaedriche chiamate voxel) e i tre tipi di robot- uno di trasporto, uno di posizionamento e l’altro di fissaggio– che li assemblano. La procedura standard è la seguente: il robot di trasporto consegna un voxel a un robot di posizionamento, il robot di fissaggio sarà lì in attesa di bloccare la struttura. Un dei due robot cammina sulla superficie, visto che è provvisto di due appendici che funzionano come delle gambe, trasportando un voxel come se fosse uno zaino. Una volta posizionato, un robot di fissaggio che vive all’interno del telaio, scivola e stringe i punti di fissaggio reversibili. Nessuno dei tre ha bisogno di un sistema di rilevamento potente e il loro funzionamento non richiede un’elevata precisione.
Le molteplici occasioni d’uso di queste strutture
“Pensiamo che questo tipo di costruzione sia particolarmente adatto a infrastrutture di lunga durata e/o molto grandi, compresi habitat, strumentazione o qualsiasi altra infrastruttura in orbita o sulla superficie della Luna (torri di servizio, strutture per l’atterraggio di veicoli) “, ha dichiarato il coautore Kenneth Cheung. “Per noi le strutture e tutti i sistemi robotici sono risorse che possono essere ottimizzate nello spazio e nel tempo. Ci saranno sempre situazioni in cui la cosa ottimale è lasciare solo la struttura sul posto (e magari visitarla periodicamente con un robot), quindi siamo partiti da questo“. Anche i pezzi stessi potrebbero essere costruiti in loco, ha osservato Gregg: “I voxel possono essere realizzati con molti materiali e processi produttivi diversi. Alla fine, per le applicazioni spaziali, vorremmo realizzare i voxel con i materiali che troviamo in loco sulla Luna o su altri corpi planetari“.
La fase sperimentale
I robot sviluppati dal laboratorio, in fase sperimentale, hanno preso 256 voxel e li hanno assemblati in una struttura di rifugio percorribile durante un totale di 4,2 giorni di lavoro. “Se li avessimo mandati su Marte o sulla Luna con un anno di anticipo rispetto all’equipaggio, avrebbero potuto costruire una dozzina di strutture di dimensioni doppie . O forse avrebbero potuto applicare il rivestimento necessario all’esterno e sigillare il tutto – un’ipotesi che va ben oltre lo scopo del documento pubblicato, ma che rappresenta un ovvio passo successivo” aggiungono gli autori.
Come verranno ricaricati i robot?
Sebbene in questo ambiente di laboratorio i robot siano alimentati da cavi, sono stati progettati per funzionare a batteria o per essere alimentati in loco. Il bot di fissaggio è già alimentato a batteria e i ricercatori stanno valutando come mantenere i robot walker (i trasportatori) carichi tra un’operazione e l’altra o, addirittura, durante le operazioni. “Pensiamo che i robot possano essere ricaricati autonomamente presso le stazioni energetiche o anche, forse, essere ricaricati in modalità wireless. L’energia potrebbe anche essere convogliata attraverso la struttura stessa, il che potrebbe essere utile sia per l’equipaggiamento della struttura che per l’alimentazione dei robot“, ha detto l’autrice del documento. Versioni del robot hanno già volato nello spazio e lavorato in microgravità, quindi non c’è da preoccuparsi. E in linea di principio non c’è nulla che impedisca loro di lavorare a gravità diverse da quella terrestre, come quella lunare. Per saperne di più sul potenziale e sulle illustrazioni concettuali di ciò che potrebbero costruire, si può approfondire l’argomento con questo post della NASA.


