Jellyfish-Bot: il robot subacqueo che potrebbe ripulire gli oceani di tutto il mondo
Uno studio descrive come un robot, ispirato alle meduse, può aiutare a combattere l’inquinamento degli oceani
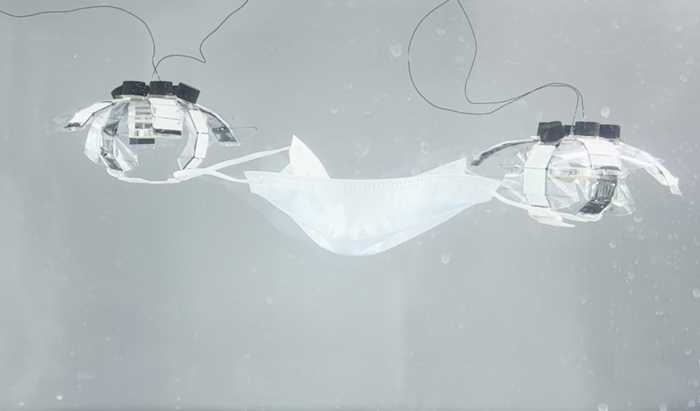
Gli scienziati del Max Planck Institute for Intelligent Systems di Stoccarda hanno sviluppato un robot ispirato alle meduse, chiamato Jellyfish-Bot, che è versatile, efficiente dal punto di vista energetico e quasi privo di rumore. Il robot utilizza attuatori elettroidraulici come muscoli artificiali per nuotare con grazia e creare vortici sotto il suo corpo. Questa funzione gli permette di raccogliere oggetti come le particelle di rifiuti e trasportarli in superficie per il riciclaggio. È anche in grado di raccogliere campioni biologici. Questo è un esempio eccellente di come la tecnologia può essere utilizzata per affrontare i problemi ambientali.
La struttura di Jellyfish-Bot

Lo sviluppo del Jellyfish-Bot da parte degli scienziati del Max Planck Institute for Intelligent Systems ha importanti implicazioni per la lotta contro l’inquinamento degli oceani. Il robot ispirato alle meduse è adatto per esplorare e campionare in ambienti complessi e non strutturati come le barriere coralline. La sua capacità di raccogliere particelle di rifiuti e trasportarle in superficie per il riciclaggio potrebbe aiutare a ridurre i cumuli di rifiuti negli oceani. Per costruire il robot, il team ha utilizzato attuatori elettroidraulici attraverso i quali scorre l’elettricità. Gli attuatori fungono da muscoli artificiali che alimentano il robot. Intorno a questi muscoli ci sono cuscini d’aria e componenti morbidi e rigidi che stabilizzano il robot e lo rendono impermeabile. In questo modo, l’alta tensione che attraversa gli attuatori non può entrare in contatto con l’acqua circostante. Un alimentatore fornisce periodicamente elettricità attraverso fili sottili, facendo contrarre ed espandere i muscoli. Questo permette al robot di nuotare con grazia e di creare vortici sotto il suo corpo. I Jellyfish-Bot sono in grado di spostare e intrappolare oggetti senza contatto fisico, operando da soli o in combinazione con altri. Ogni robot lavora più velocemente di altre invenzioni simili, raggiungendo una velocità fino a 6,1 cm/s. Inoltre, Jellyfish-Bot richiede solo una bassa potenza di ingresso di circa 100 mW. Inoltre, è sicuro per gli esseri umani e per i pesci, nel caso in cui il materiale polimerico che isola il robot dovesse un giorno essere strappato. Nel frattempo, il rumore del robot non può essere distinto. In questo modo Jellyfish-Bot interagisce delicatamente con l’ambiente circostante senza disturbarlo, proprio come la sua controparte naturale. Il robot è composto da diversi strati: alcuni irrigidiscono il robot, altri servono a tenerlo a galla o a isolarlo. Un ulteriore strato polimerico funge da pelle galleggiante. I muscoli artificiali alimentati elettricamente, noti come HASEL, sono incorporati al centro dei diversi strati. Gli HASEL sono sacchetti di plastica riempiti di dielettrico liquido e parzialmente coperti da elettrodi. L’applicazione di un’alta tensione su un elettrodo lo carica positivamente, mentre l’acqua circostante si carica negativamente. Questo genera una forza tra l’elettrodo a carica positiva e l’acqua a carica negativa che spinge l’olio all’interno delle buste avanti e indietro, facendo sì che le buste si contraggano e si rilassino, come un vero e proprio muscolo. Gli HASEL possono sostenere le elevate sollecitazioni elettriche generate dagli elettrodi carichi e sono protetti dall’acqua da uno strato isolante. Si tratta di un aspetto importante, poiché i muscoli HASEL non erano mai stati utilizzati prima per costruire un robot subacqueo.
Il design dei robot del futuro ispirato alla natura
Inoltre, il design innovativo del Jellyfish-Bot potrebbe ispirare lo sviluppo di altri robot subacquei morbidi e silenziosi per una vasta gamma di applicazioni, come la ricerca scientifica, l’esplorazione sottomarina e il monitoraggio ambientale. Esistono altri robot subacquei morbidi ispirati alla natura che sono stati sviluppati per esplorare e campionare in ambienti complessi e non strutturati come le barriere coralline. Gli ingegneri si sono ispirati al movimento unico di vermi, serpenti e meduse per sviluppare una nuova generazione di robot subacquei morbidi. Tuttavia, il Jellyfish-Bot sviluppato dal Max Planck Institute for Intelligent Systems è unico nel suo genere grazie al suo design innovativo che utilizza attuatori elettroidraulici come muscoli artificiali per nuotare con grazia e creare vortici sotto il suo corpo. Questa funzione gli permette di raccogliere particelle di rifiuti e trasportarle in superficie per il riciclaggio. Forse i fili che alimentano i robot saranno presto un ricordo del passato. “Il nostro obiettivo è sviluppare robot senza fili. Fortunatamente, abbiamo compiuto il primo passo verso questo obiettivo. Abbiamo incorporato tutti i moduli funzionali, come la batteria e le parti di comunicazione wireless, per consentire una futura manipolazione senza fili“, continua Tianlu Wang. Il team ha fissato un’unità di galleggiamento nella parte superiore del robot e una batteria e un microcontrollore nella parte inferiore. Hanno poi portato la loro invenzione a nuotare nello stagno del campus Max Planck di Stoccarda e sono riusciti a guidarla con successo. Finora, tuttavia, non sono riusciti a far cambiare rotta al robot wireless e a nuotare nella direzione opposta.