Robot che pensano come umani mentre cercano oggetti

Un modello aiuta i robot a pensare più come gli umani quando cercano oggetti: prendendo dei punti di riferimento e “pensando per associazioni” è più facile trovare qualcosa in ambienti complessi.
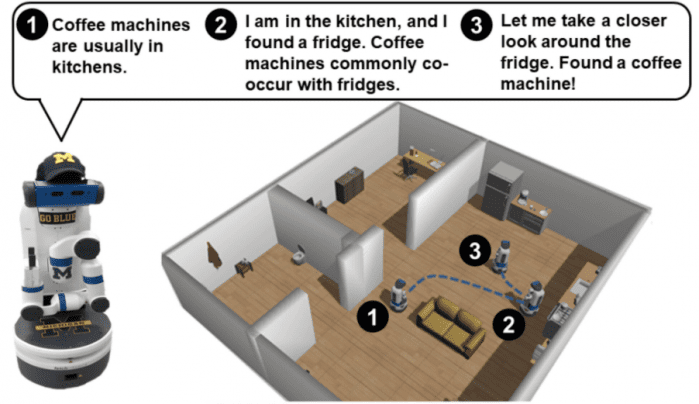
Siamo in salotto in un’epoca in cui al posto dei maggiordomi avremo dei robot e abbiamo voglia di berci un caffè così chiediamo: “Robot mi faresti un caffè per favore?”
A questo comando il nostro maggiordomo artificiale comincia questa sequenza di pensieri: “le macchine per il caffè di solito si trovano in cucina” e, appena arrivato in cucina continua riflettendo: “ho visto il frigorifero e di solito le macchine del caffè si trovano vicino a questo elettrodomestico: controlliamo meglio lì intorno… trovata!”.
I robot possono imparare a trovare le cose più velocemente conoscendo come sono collegati diversi oggetti all’interno della casa.
Sembra fantascienza, ma è realtà dimostrata dall’Università del Michigan: i robot possono imparare a trovare le cose più velocemente conoscendo come sono collegati diversi oggetti all’interno della casa.
Il lavoro, guidato dal Prof. Chad Jenkins, è stato riconosciuto alla Conferenza internazionale di robotica e automazione del 2020 con un premio come miglior paper in Robotica cognitiva.
Uno scopo comune per chi si occupa di robotica è quello di dare alle macchine la capacità di navigare in contesti realistici, ad esempio negli ambienti familiari disordinati e imperfetti in cui trascorriamo i nostri giorni.
Essere in grado di cercare in modo efficiente oggetti in un ambiente è fondamentale per i robot di servizio affinché eseguano autonomamente compiti: questo è un metodo pratico che consente ai robot di cercare attivamente oggetti target in un ambiente complesso.
dichiara Zhen Zeng, il ricercatore principale della ricerca.
Ma le case non sono il caos totale (quasi sempre almeno). Organizziamo i nostri spazi attorno a diversi tipi di attività e alcuni gruppi di articoli vengono generalmente archiviati o installati in stretta vicinanza l’uno all’altro. Le cucine in genere contengono i nostri forni, frigoriferi, microonde e altri piccoli elettrodomestici da cucina; nelle camere da letto ci sono di solito i nostri comò, letti e comodini, e così via per gli altri ambienti.
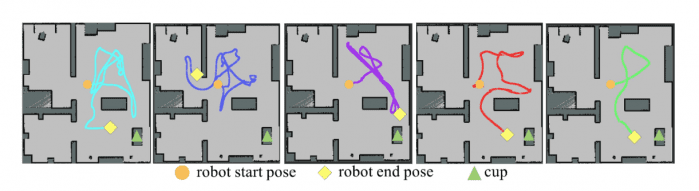
Un confronto tra diversi metodi di ricerca di oggetti negli esperimenti di Jenkins e Zeng. Il modello raffigurato all’estrema destra utilizza la loro tecnica e si traduce nel percorso più veloce e diretto. Credito: Università del Michigan
Zeng e Jenkins hanno proposto un metodo per sfruttare queste comuni relazioni spaziali. Il loro modello è stato chiamato “SLiM” (Semantic Linking Maps) e associa alcuni “oggetti di riferimento” nella memoria del robot ad altri oggetti correlati, insieme ai dati su come i due si trovano in genere nello spazio. Usano SLiM per tener conto di diverse caratteristiche sia dell’oggetto di destinazione che dell’oggetto di riferimento al fine di fornire ai robot una comprensione più solida di come le cose possono essere disposte in un ambiente.
Il modello non è semplicemente un hardcoding di quanto gli oggetti diversi sono vicini l’uno all’altro: SLiM tiene conto dell’incertezza nella posizione di un oggetto.
Le opere precedenti presumono che gli oggetti di riferimento siano statici, in quanto rimangono per lo più dove sono stati osservati l’ultima volta.
Spiegano gli autori nel loro articolo sul progetto. Per superare questa limitazione, i ricercatori hanno usato un grafico fattoriale, un tipo speciale di grafico per rappresentare la distribuzione di probabilità, ossia per fare un modello probabilistico delle relazioni tra diversi oggetti.
Con questa conoscenza di possibili relazioni tra gli oggetti, SLiM guida il robot a esplorare regioni promettenti che possono contenere oggetti target o punti di riferimento.
Il team ha testato le prestazioni di cinque diversi modelli di ricerca nello stesso ambiente simulato. Uno era una ricerca diretta ingenua senza alcuna conoscenza delle relazioni spaziali degli oggetti, e gli altri quattro utilizzavano la mappatura spaziale di SLiM combinata con diverse strategie di ricerca o vantaggi iniziali:
- Ricerca diretta con una posizione precedente nota per la destinazione, ma non tenendo conto della probabilità che l’oggetto possa essere stato spostato.
- Ricerca diretta in una posizione precedente nota per la destinazione che tiene conto della probabilità che l’oggetto possa essere stato spostato.
- Ricerca diretta senza conoscenza preliminare della posizione dell’oggetto
- Ricerca ibrida senza conoscenza preliminare della posizione dell’oggetto.
Alla fine, SLiM combinato con la ricerca ibrida ha trovato con successo oggetti target con il percorso più diretto e con il minor tempo di ricerca in ogni test.
Potrebbero interessarti:

